Objective: Create a grabber to lift weight.
Requirements:
Minimize operator input to connect device to block
Ensure reliable lift using friction along block sides
Minimize cost and build time.
Design Evolution:
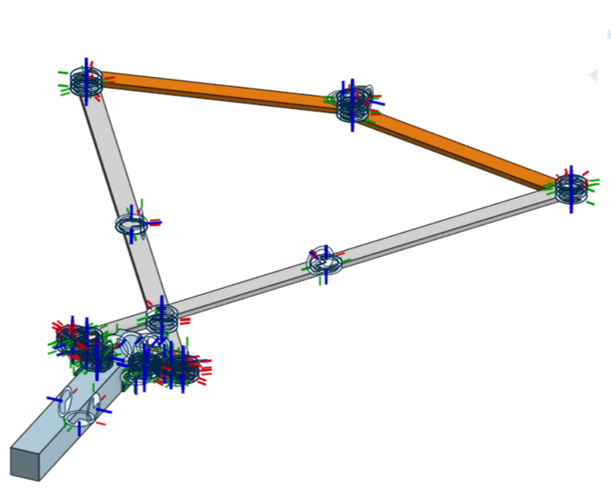
Initial concept: log lifting claw
Issue: geometry lacked sufficient normal force
Solution: inverted design with friction members closer to pivot.
Member lengths optimized for maximum normal force and reliable contact.
Results: The mechanism was able to maintain grip well past the designed weight. The max weight was applied and the grabber did not slip. However, the arms did bend.

